Endüstriyel robot, genel amaçlı, insana benzer özelliklere sahip programlanabilir bir makinadır. Bir robotun insana benzeyen en önemli özelliği onun koludur. Tutma ve yerleştirme işlemlerinde robot kolu kullanılır. Robot kolu, başka bir makinayla birleştirilerek, malzemenin yüklenmesi ve takım değiştirme işelmini yapmaktadır. Kesme, şekil verme, yüzey kaplama, silindirik ve düzlem yüzey taşlama gibi imalat işlemlerini gerçekleştirir. Montaj ve kontrol uygulamalarında kullanılımaktadır.
2.Robot Şekilleri(Konfigürasyonları)
Bir robot hareketinin kapasitesi, kontrol edilebilmesi mümkün olan eksenlerdeki harekelerle belirlenir. Sayısal denetimdeki hareketlere çok benzerdir. Endüstriyel robotlar değişik tip ve boyutlarda yapılmaktadırlar. Çeşitli kol hareketlerini yapabilirler ve farklı hareket sistemlerine sahiptirler. Endüstriyel robotlar genel olarak şu konfigürasyonlarda üretilmektedirler: 1) Küresel (polar coordinate) konfigürasyonu 2) Silindirik koordinat konfigürasyonu 3) Mafsallı kol (jointed arm) konfigürasyonu 4) Kartezyen koordinat konfigürasyonu
2.1. Küresel Koordinat Konfigürasyonu
Çoğunlukla polar konfigürasyon diye adlandırılan küresel tasarım silindirik kol konfigürasyonunun değişik bir uyarlamasıdır. Her türlü uygulamada robot konfigürasyonunun sağladığı çalışma hacmi (çalışma zarfı) önemli bir yer tutar. Kol, küresel bir hacim içinde hareket eder. Robotun bir döner tabanı vardır ve bu taban etrafinda dönebilir. Kolun bir parçasi içeri disari öteleme hareketi yapabilen teleskopik koldur. Bu teleskobik kolu yukarı-aşağı hareket ettirmek için assagi yukari dönebilirbir mafsal kullanılır. Bu robot tipine örnek Unimate 2000 serisi robotlardır.
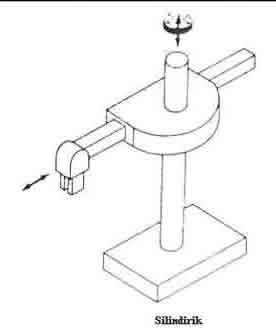
2.2. Silindirik Koordinat Konfigürasyonu
Silindirik kol tasarımı, çalışma bölgesinde engellerin olmadığı uygulamalarda kullanılır. Diğer yandan mafsallı bir robot engellerden kaçınmak için programlanabilir. Silindir konfigürasyonunun tipik işi nesneleri bir yerden başka bir yere taşımaktır (al ve yerleştir). Çalisma alanlari silindiriktir. Kolun bir bölümü dikey, diger bölümü ise yatay hareket eder. Bu konfigürasyonda, robot gövdesi düşey eksen etrafında dönebilen düşey bir kolondur. Kol kısmının bir kaç hareketli kısmı vardır. Bu hareketli kısımlar kolu yukarı-aşağı ve içeri-dışarı hareket ettirir ve bilek kısmının dönmesini sağlarlar.
2.3. Mafsallı Kol Konfigürasyonu
Bağlantı parçalarından oluşan robot kol konfigürasyonu genellikle antropomorfik veya mafsallı robot diye adlandırılır. Yaygın bir şekilde kullanılır, çünkü otomotiv endüstrisindeki nokta kaynağı ve boyama işlemlerinde olduğu gibi maharetli hareketleri yapabilecek kabiliyete sahiptirler. Mafsallı kol konfigürasyonu, insan kolunun yapısına benzer şekilde tasarlanmıştır. Robotun, insan omuzu, dirsek ve bilek mafsallarını yaptığı hareketlere benzer hareketleri yapabilmesi için hareketli parçaları mafsallarla birleştirilmiştir. Robot kol bir tabana bağlıdır. Bu taban kendi ekseni etrafında dönebilir.
2.4. Kartezyen Koordinat Konfigürasyonu
Bu konfigürasyon en kısıtlı hareket serbestine sahip robot tasarım şeklidir. Bazı parçaların montajı için gerekli işlemler kartezyen konfigürasyonlu robotlar tarafından yapılır. Bu robotların şekli birbirine dik üç eksende hareket eden kısımlara sahiptir. Hareketli kısımlar X, Y ve Z kartezyen koordinat düzleminde her kol bir öncekine göre dik açiyla kayar. Robot, üç boyutlu dikdörtgen prizması hacmi içindeki noktalara kolunu hareket ettirebilir. Dikdörtgen seklinde bir çalisma alanlari vardir.



 Yeni Kayıt
Yeni Kayıt








 Konudaki Resimler
Konudaki Resimler