


 Yeni Kayıt
Yeni Kayıt







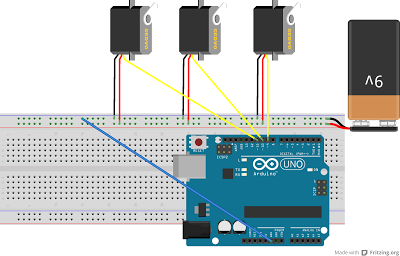
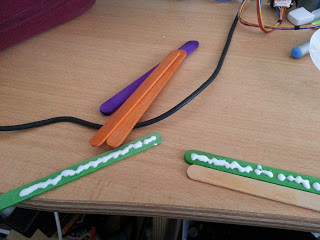
 Konudaki Resimler
Konudaki Resimler
< Bu mesaj bu kişi tarafından değiştirildi elmek6 -- 27 Temmuz 2013; 3:48:53 > |










 hic değilse yabancı bir proje linki verseniz ben oradan birşeyler yapmaya calissam
hic değilse yabancı bir proje linki verseniz ben oradan birşeyler yapmaya calissam



















Bildirim





< Bu mesaj bu kişi tarafından değiştirildi elmek6 -- 27 Temmuz 2013; 3:48:53 > |
|
|
|
|
|
< Bu ileti mobil sürüm kullanılarak atıldı > |
|
|
|
|
|
|
|
|
|
< Bu ileti mobil sürüm kullanılarak atıldı > |
|
|

